【OpenCV教程】轮廓检测过程
@
目录
1.查找轮廓
1.1 API
CV_EXPORTS_W void findContours( InputArray image, OutputArrayOfArrays contours,
OutputArray hierarchy, int mode,
int method, Point offset = Point());
/** @overload */
CV_EXPORTS void findContours( InputArray image, OutputArrayOfArrays contours,
int mode, int method, Point offset = Point());
- 参数如下
| 参数 | 含义 |
|---|---|
| image | 输入图片,数据类型Mat |
| contours | 保存输出轮廓的点坐标。通常用vector<vector<Point>>数据类型担任,通过Point可以看出存储的是坐标。 |
| hierarchy | 可选参数,保存输出轮廓的层级关系。通常用vector<Vec4i>数据类型担任。 详见下文 |
| mode | 轮廓层级的检测模式 ,详见下文 |
| method | 轮廓坐标点的储存方式 ,详见下文 |
| offset | 额外偏移量,在每一个检测出的轮廓点上加上该偏移量,可以是负值。当所分析图像是另外一个图像的ROI的时候,通过加减这个偏移量,可以把ROI图像的检测结果投影到原始图像对应位置上。 |
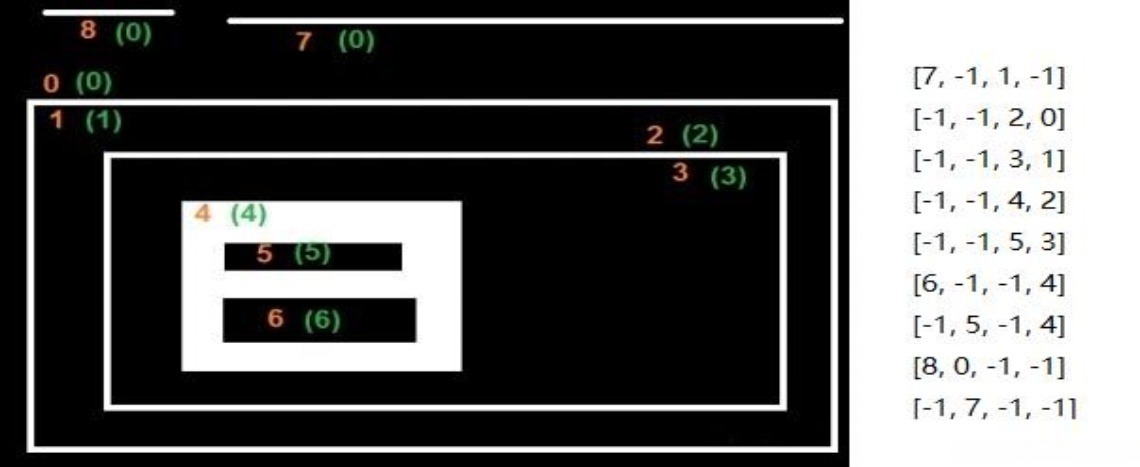
- hierarchy[i][0]:第i个轮廓的同一层级后一个轮廓的索引编号。
- hierarchy[i][1]:第i个轮廓的同一层级前一个轮廓的索引编号。
- hierarchy[i][2]:第i个轮廓的子轮廓的索引编号。
- hierarchy[i][3]:第i个轮廓的父轮廓的索引编号。
- 如果当前轮廓没有对应的后一个轮廓、前一个轮廓、父轮廓或内嵌轮廓的话,则hierarchy[i][0] ~hierarchy[i][3]的相应位被设置为默认值-1。
1.2 轮廓层级检测模式:索引号(层级)
enum RetrievalModes {
RETR_EXTERNAL = 0,
RETR_LIST = 1,
RETR_CCOMP = 2,
RETR_TREE = 3,
};
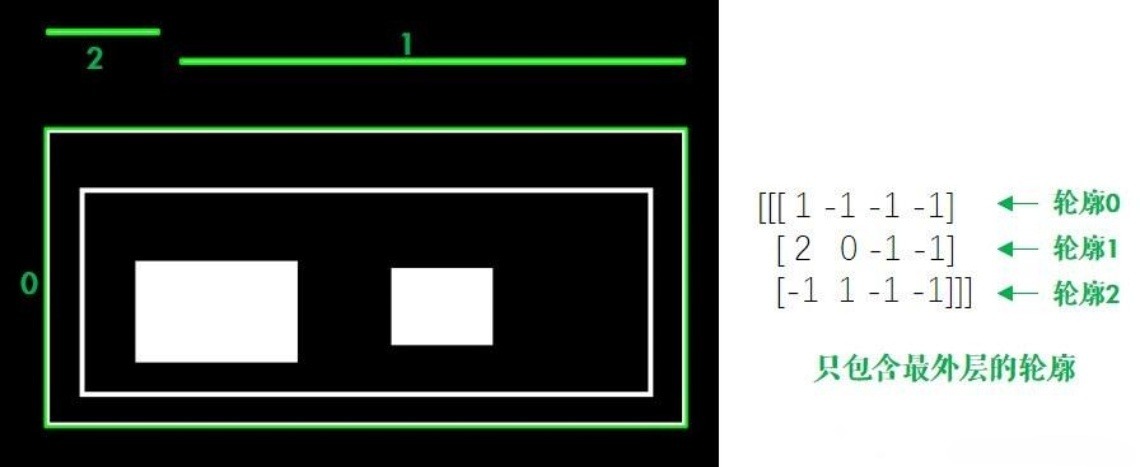
RETR_EXTERNAL(索引顺序:从右下到左上)
只检测最外围轮廓,包含在外围轮廓内的内围轮廓被忽略
RETR_LIST(recommended)(索引顺序:从右下到左上,由外到内)
检测所有的轮廓,包括内围、外围轮廓,但是检测到的轮廓不建立层级关系,这就意味着这个检索模式下不存在父轮廓或内嵌轮廓,所以hierarch[i]向量内所有元素的第3、第4个分量都会被置为-1。

RETR_CCOMP(not recommended)(索引顺序:由内到外,从右下到左上)
检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层

RETR_TREE(recommended)
检测所有轮廓,所有轮廓建立一个等级树结构。外层轮廓包含内层轮廓,内层轮廓还可以继续包含内嵌轮廓。
1.3 轮廓坐标点储存方式
enum ContourApproximationModes {
CHAIN_APPROX_NONE = 1,
CHAIN_APPROX_SIMPLE = 2,
CHAIN_APPROX_TC89_L1 = 3,
CHAIN_APPROX_TC89_KCOS = 4
};
- method可选值如下
| method可选值 | 含义 |
|---|---|
| CHAIN_APPROX_NONE | 保存物体边界上所有连续的轮廓点到contours向量内 |
| CHAIN_APPROX_SIMPLE(recommended) | 仅保存轮廓的拐点信息,把所有轮廓拐点处的点保存入contours向量内,拐点与拐点之间直线段上的信息点不予保留,效率比较高。 |
| CHAIN_APPROX_TC89_L1或CV_CHAIN_APPROX_TC89_KCOS | 使用tehChinl chain 近似算法(not important) |
2.绘制轮廓
2.1 API
CV_EXPORTS_W void drawContours( InputOutputArray image, InputArrayOfArrays contours,
int contourIdx, const Scalar& color,
int thickness = 1, int lineType = LINE_8,
InputArray hierarchy = noArray(),
int maxLevel = INT_MAX, Point offset = Point() );
- 参数如下
| 参数 | 含义 |
|---|---|
| image | 绘制轮廓的画布,数据类型Mat |
| contours | 输入轮廓,数据类型vector<vector<Point>> |
| contourIdx(contour index) | 欲绘制的轮廓的索引值,输入-1可以绘制所有轮廓 |
| color | 绘制线条的颜色 |
| thickness | 绘制线条的粗细。若取负值,则表示进行填充 |
| lineType | 绘制线条的连通类型 |
| hierarchy | 可选的层次结构信息。它仅在当你需要绘制一些轮廓线时被使用。(详见参数maxLevel)默认为noArray(),返回一个空数组。 |
| maxLevel | 绘制轮廓线的最高级别。此参数仅在参数hierarchy有效时被考虑。详见下表 |
| offset | 额外偏移量,在每一个绘制出的轮廓点上加上该偏移量,可以是负值。当所分析图像是另外一个图像的ROI的时候,通过加减这个偏移量,可以把ROI图像的绘制结果投影到原始图像对应位置上。 |
- maxLevel可选值如下
| maxLevel可选值 | 含义 |
|---|---|
| 0 | 只有被指定的轮廓被绘制 |
| 1 | 绘制被指定的轮廓和其下一级轮廓 |
| 2 | 绘制被指定的轮廓和其所有子轮廓 |
3.轮廓面积和周长
3.1 面积(非原地算法)
CV_EXPORTS_W double contourArea( InputArray contour, bool oriented = false );
- 参数如下
| 参数 | 含义 |
|---|---|
| contour | 某一个轮廓,数据类型vector<Point> |
| oriented | 有方向的区域标志(not important)。若为true: 此函数依赖轮廓的方向(顺时针或逆时针)返回一个已标记区域的值。若为false: 默认值,意味着返回不带方向的绝对值。 |
- 此函数利用格林公式计算轮廓的面积。对于具有自交点的轮廓,该函数几乎肯定会给出错误的结果。
3.2周长(非原地算法)
CV_EXPORTS_W double arcLength( InputArray curve, bool closed );
- 参数如下
| 参数 | 含义 |
|---|---|
| curve | 某一个轮廓,数据类型vector<Point> |
| closed | 轮廓是否是闭合的 |
4.多边形逼近
CV_EXPORTS_W void approxPolyDP( InputArray curve,
OutputArray approxCurve,
double epsilon, bool closed );
- 参数如下
| 参数 | 含义 |
|---|---|
| curve | 某一个轮廓,数据类型vector<Point> |
| approxCurve | 输出多边形的点集,数据类型vector<Point> |
| epsilon | 设置精度,越小则精度越高,多边形越趋近于曲线,拟合效果更好但效率低。 |
| closed | 轮廓是否是闭合的 |
5.凸包
CV_EXPORTS_W void convexHull( InputArray points, OutputArray hull,
bool clockwise = false, bool returnPoints = true );
- 参数如下
| 参数 | 含义 |
|---|---|
| points | 输入点集,数据类型vector<Point> |
| hull | 输出凸包。数据类型取决于returnPoints,vector<Point>或vector<int> |
| clockwise | 拟合凸包的直线的转动方向,TRUE为顺时针,否则为逆时针。 |
| returnPoints | 若为true,则在hull中存储点的坐标。若为false,则在hull中存储点的索引,索引值根据参数points得到。默认为true |
6.外接矩形
6.1最小外接矩形(返回RotatedRect)
CV_EXPORTS_W RotatedRect minAreaRect( InputArray points );
- 参数如下
| 参数 | 含义 |
|---|---|
| points | 输入点集,数据类型vector<Point> |
6.2最大外界矩形(返回Rect)
CV_EXPORTS_W Rect boundingRect( InputArray array );
- 参数如下
| 参数 | 含义 |
|---|---|
| points | 输入点集,数据类型vector<Point> |
本文由博客一文多发平台 OpenWrite 发布!